v.lidar.mcc - Reclassifies points of a LiDAR point cloud as ground / nonground using a multiscale curvature based classification algorithm
Others

{kind=link}
Permanent lenke
http://hdl.handle.net/11250/2429833Utgivelsesdato
2015Metadata
Vis full innførselSamlinger
Originalversjon
https://grass.osgeo.org/grass72/manuals/addons/v.lidar.mcc.htmlSammendrag
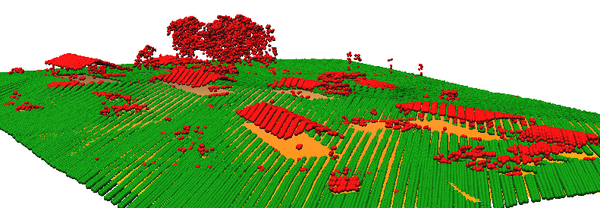
v.lidar.mcc is a modified implementation of the Multiscale Curvature Classification (MCC) algorithm proposed by Evans and Hudak 2007. The aim of the MCC-procedure is to filter non-ground returns caused by vegetation cover from point clouds produced with any kind of LiDAR instrument (e.g. also instruments without intensity information). The basic principle of the algorithm is to classify those points as non-ground points which deviate more than a user-defined threshold (t) from a surface which was interpolated from the full point cloud as a thin plate (here implemented with a bilinear spline interpolation with Tykhonov regularization through v.outlier). Tension (f) and spline steps (s) parameter are passed to the relevant parameters in v.outlier.
On each scale domain v.lidar.mcc calls v.outlier repeatedly until the algorithm converges, i.e. less than the amount of points (percentage of input points to the iteration) defined in the convergence threshold (j) are classified as non-ground points. Scale domains are defined in relation to the current region. With a number of scale domains (nl) greater than 1 scale domains are distributed evenly "around" the current region. With the default number of three scale domains, the first scale domaine uses half the resolution of the current region, scale domain two uses the current region
and scale domain three uses 1,5 times the resolution of the current region.